
Here all publications which are part of the ABIOMATER project can be found. The abstracts and preview figures are shown, for the full articles follow the links to the journal websites.
2020
Microfluidic devices powered by integrated elasto-magnetic pumps – Binsley, J. L., et al. Lab Chip (2020).
 Abstract: We show how an asymmetric elasto-magnetic system provides a novel integrated pumping solution for lab-on-a-chip and point of care devices. This monolithic pumping solution, inspired by Purcell’s 3-link swimmer, is integrated within a simple microfluidic device, bypassing the requirement of external connections. We experimentally prove that this system can provide tuneable fluid flow with a flow rate of up to 600 μL h−1. This fluid flow is achieved by actuating the pump using a weak, uniform, uniaxial, oscillating magnetic field, with field amplitudes in the range of 3–6 mT. Crucially, the fluid flow can be reversed by adjusting the driving frequency. We experimentally prove that this device can successfully operate on fluids with a range of viscosities, where pumping at higher viscosity correlates with a decreasing optimal driving frequency. The fluid flow produced by this device is understood here by examining the non-reciprocal motion of the elasto-magnetic component. This device has the capability to replace external pumping systems with a simple, integrated, lab-on-a-chip component.
Abstract: We show how an asymmetric elasto-magnetic system provides a novel integrated pumping solution for lab-on-a-chip and point of care devices. This monolithic pumping solution, inspired by Purcell’s 3-link swimmer, is integrated within a simple microfluidic device, bypassing the requirement of external connections. We experimentally prove that this system can provide tuneable fluid flow with a flow rate of up to 600 μL h−1. This fluid flow is achieved by actuating the pump using a weak, uniform, uniaxial, oscillating magnetic field, with field amplitudes in the range of 3–6 mT. Crucially, the fluid flow can be reversed by adjusting the driving frequency. We experimentally prove that this device can successfully operate on fluids with a range of viscosities, where pumping at higher viscosity correlates with a decreasing optimal driving frequency. The fluid flow produced by this device is understood here by examining the non-reciprocal motion of the elasto-magnetic component. This device has the capability to replace external pumping systems with a simple, integrated, lab-on-a-chip component.
2019
Controlling collective rotational patterns of magnetic rotors – Matsunaga, D., et al. Nat. Commun. 10, 4696 (2019).
 Abstract: Magnetic actuation is widely used in engineering specific forms of controlled motion in microfluidic applications. A challenge, however, is how to extract different desired responses from different components in the system using the same external magnetic drive. Using experiments, simulations, and theoretical arguments, we present emergent rotational patterns in an array of identical magnetic rotors under an uniform, oscillating magnetic field. By changing the relative strength of the external field strength versus the dipolar interactions between the rotors, different collective modes are selected by the rotors. When the dipole interaction is dominant the rotors swing upwards or downwards in alternating stripes, reflecting the spin-ice symmetry of the static configuration. For larger spacings, when the external field dominates over the dipolar interactions, the rotors undergo full rotations, with different quarters of the array turning in different directions. Our work sheds light on how collective behaviour can be engineered in magnetic systems.
Abstract: Magnetic actuation is widely used in engineering specific forms of controlled motion in microfluidic applications. A challenge, however, is how to extract different desired responses from different components in the system using the same external magnetic drive. Using experiments, simulations, and theoretical arguments, we present emergent rotational patterns in an array of identical magnetic rotors under an uniform, oscillating magnetic field. By changing the relative strength of the external field strength versus the dipolar interactions between the rotors, different collective modes are selected by the rotors. When the dipole interaction is dominant the rotors swing upwards or downwards in alternating stripes, reflecting the spin-ice symmetry of the static configuration. For larger spacings, when the external field dominates over the dipolar interactions, the rotors undergo full rotations, with different quarters of the array turning in different directions. Our work sheds light on how collective behaviour can be engineered in magnetic systems.
Anomalous diffusion of motile colloids dispersed in liquid crystals – Pagès, J. M., et al. Phys. Rev. Lett. 122, 2–7 (2019).
 Abstract: We study the superdiffusion of driven colloidal particles dispersed in a nematic liquid crystal. While motion is ballistic in the driving direction, our experiments show that transversal fluctuations become superdiffusive depending on the topological defect pattern around the inclusions. The phenomenon can be reproduced with different driving methods and propulsion speeds, while it is strongly dependent on particle size and temperature. We propose a mechanism based on the geometry of the liquid crystal backflow around the inclusions to justify the persistence of thermal fluctuations and to explain the observed temperature and particle size dependence of the superdiffusive behavior based on material and geometrical parameters.
Abstract: We study the superdiffusion of driven colloidal particles dispersed in a nematic liquid crystal. While motion is ballistic in the driving direction, our experiments show that transversal fluctuations become superdiffusive depending on the topological defect pattern around the inclusions. The phenomenon can be reproduced with different driving methods and propulsion speeds, while it is strongly dependent on particle size and temperature. We propose a mechanism based on the geometry of the liquid crystal backflow around the inclusions to justify the persistence of thermal fluctuations and to explain the observed temperature and particle size dependence of the superdiffusive behavior based on material and geometrical parameters.
Tunable self-healing of magnetically propelling colloidal carpets – Massana-Cid, et al. Nat. Commun. 10, 2444 (2019).
 Abstract: The process of crystallization is difficult to observe for transported, out-of-equilibrium systems, as the continuous energy injection increases activity and competes with ordering. In emerging fields such as microfluidics and active matter, the formation of long-range order is often frustrated by the presence of hydrodynamics. Here we show that a population of colloidal rollers assembled by magnetic fields into large-scale propelling carpets can form perfect crystalline materials upon suitable balance between magnetism and hydrodynamics. We demonstrate a field-tunable annealing protocol based on a controlled colloidal flow above the carpet that enables complete crystallization after a few seconds of propulsion. The structural transition from a disordered to a crystalline carpet phase is captured via spatial and temporal correlation functions. Our findings unveil a novel pathway to magnetically anneal clusters of propelling particles, bridging driven systems with crystallization and freezing in material science.
Abstract: The process of crystallization is difficult to observe for transported, out-of-equilibrium systems, as the continuous energy injection increases activity and competes with ordering. In emerging fields such as microfluidics and active matter, the formation of long-range order is often frustrated by the presence of hydrodynamics. Here we show that a population of colloidal rollers assembled by magnetic fields into large-scale propelling carpets can form perfect crystalline materials upon suitable balance between magnetism and hydrodynamics. We demonstrate a field-tunable annealing protocol based on a controlled colloidal flow above the carpet that enables complete crystallization after a few seconds of propulsion. The structural transition from a disordered to a crystalline carpet phase is captured via spatial and temporal correlation functions. Our findings unveil a novel pathway to magnetically anneal clusters of propelling particles, bridging driven systems with crystallization and freezing in material science.
Magnetically-actuated artificial cilium: a simple theoretical model – Meng, F., et al. Soft Matter 15, 3864–3871 (2019).
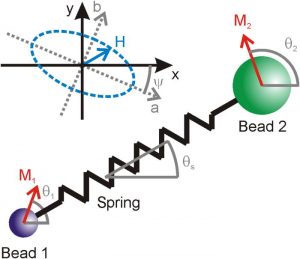
 Abstract: We propose a theoretical model for a magnetically-actuated artificial cilium in a fluid environment and investigate its dynamical behaviour, using both analytical calculations and numerical simulations. The cilium consists of a spherical soft magnet, a spherical hard magnet, and an elastic spring that connects the two magnetic components. Under a rotating magnetic field, the cilium exhibits a transition from phase-locking at low frequencies to phase-slipping at higher frequencies. We study the dynamics of the magnetic cilium in the vicinity of a wall by incorporating its hydrodynamic influence, and examine the efficiency of the actuated cilium in pumping viscous fluids. This cilium model can be helpful in a variety of applications such as transport and mixing of viscous solutions at small scales and fabricating microswimmers.
Abstract: We propose a theoretical model for a magnetically-actuated artificial cilium in a fluid environment and investigate its dynamical behaviour, using both analytical calculations and numerical simulations. The cilium consists of a spherical soft magnet, a spherical hard magnet, and an elastic spring that connects the two magnetic components. Under a rotating magnetic field, the cilium exhibits a transition from phase-locking at low frequencies to phase-slipping at higher frequencies. We study the dynamics of the magnetic cilium in the vicinity of a wall by incorporating its hydrodynamic influence, and examine the efficiency of the actuated cilium in pumping viscous fluids. This cilium model can be helpful in a variety of applications such as transport and mixing of viscous solutions at small scales and fabricating microswimmers.
Optical response of magnetically actuated biocompatible membranes-Joisten, H. et al. Nanoscale 11, 10667–10683 (2019).
 Abstract: Biocompatible suspended magneto-elastic membranes were prepared. They consist of PDMS (polydimethylsiloxane) films, with embedded arrays of micrometric magnetic pillars made with lithography techniques. For visible light wavelengths, our membranes constitute magnetically tunable optical diffraction gratings, in transmission and reflection. The optical response has been quantitatively correlated with membrane structure and deformation, through optical and magneto-mechanical models. In contrast to the case of planar membranes, the diffraction patterns measured in reflection and transmission vary very differently upon magnetic field application. Indeed, the reflected beam is largely affected by the membrane bending, whereas the transmitted beam remains almost unchanged. In reflection, even weak membrane deformation can produce significant changes of the diffraction patterns. This field-controlled optical response may be used in adaptive optical applications, photonic devices, and for biological applications.
Abstract: Biocompatible suspended magneto-elastic membranes were prepared. They consist of PDMS (polydimethylsiloxane) films, with embedded arrays of micrometric magnetic pillars made with lithography techniques. For visible light wavelengths, our membranes constitute magnetically tunable optical diffraction gratings, in transmission and reflection. The optical response has been quantitatively correlated with membrane structure and deformation, through optical and magneto-mechanical models. In contrast to the case of planar membranes, the diffraction patterns measured in reflection and transmission vary very differently upon magnetic field application. Indeed, the reflected beam is largely affected by the membrane bending, whereas the transmitted beam remains almost unchanged. In reflection, even weak membrane deformation can produce significant changes of the diffraction patterns. This field-controlled optical response may be used in adaptive optical applications, photonic devices, and for biological applications.
Microscale Magneto-Elastic Composite Swimmers at the Air-Water and Water-Solid Interfaces Under a Uniaxial Field – Bryan, M. T. et al. Phys. Rev. Appl. 11, 044019 (2019).
 Abstract: Self-propulsion of magneto-elastic composite microswimmers is demonstrated under a uniaxial field at both the air-water and the water-substrate interfaces. The microswimmers are made of elastically linked magnetically hard Co−Ni−P and soft Co ferromagnets, fabricated using standard photolithography and electrodeposition. Swimming speed and direction are dependent on the field frequency and amplitude, reaching a maximum of 95.1 µm/s on the substrate surface. Fastest motion occurs at low frequencies via a spinning (air-water interface) or tumbling (water-substrate interface) mode that induces transient inertial motion. Higher frequencies result in low Reynolds number propagation at both interfaces via a rocking mode. Therefore, the same microswimmer can be operated as either a high or a low Reynolds number swimmer. Swimmer pairs agglomerate to form a faster superstructure that propels via spinning and rocking modes analogous to those seen in isolated swimmers. Microswimmer propulsion is driven by a combination of dipolar interactions between the Coand Co−Ni−P magnets and rotational torque due to the applied field, combined with elastic deformation and hydrodynamic interactions between different parts of the swimmer, in agreement with previous models.
Abstract: Self-propulsion of magneto-elastic composite microswimmers is demonstrated under a uniaxial field at both the air-water and the water-substrate interfaces. The microswimmers are made of elastically linked magnetically hard Co−Ni−P and soft Co ferromagnets, fabricated using standard photolithography and electrodeposition. Swimming speed and direction are dependent on the field frequency and amplitude, reaching a maximum of 95.1 µm/s on the substrate surface. Fastest motion occurs at low frequencies via a spinning (air-water interface) or tumbling (water-substrate interface) mode that induces transient inertial motion. Higher frequencies result in low Reynolds number propagation at both interfaces via a rocking mode. Therefore, the same microswimmer can be operated as either a high or a low Reynolds number swimmer. Swimmer pairs agglomerate to form a faster superstructure that propels via spinning and rocking modes analogous to those seen in isolated swimmers. Microswimmer propulsion is driven by a combination of dipolar interactions between the Coand Co−Ni−P magnets and rotational torque due to the applied field, combined with elastic deformation and hydrodynamic interactions between different parts of the swimmer, in agreement with previous models.
Advanced Processing of Micropatterned Elasto-Magnetic Membranes – Martin, E. L., et al. . IEEE Trans. Magn. 55, 1–6 (2019).
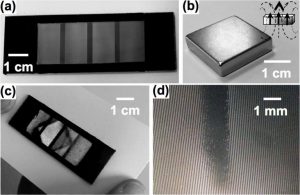
 Abstract: We report on a fabrication of a highly structured elasto-magnetic membrane with microscopic unit cells using lithographic techniques and electrodeposition. The membrane comprises micromagnets of CoNiP and Co connected via an elastic PDMS network with an area spanning 12 mm 2 . Ellipsoidal CoNiP and circular Co particles were produced by electrodeposition to achieve diameters of 30 (major) and 10 μm (minor) and 10 μm, respectively, with a thickness in the range of 6-10 μm. The electrodeposition parameters have been optimized on deposition of CoNiP films to produce an in-plane coercivity for CoNiP elements of 435 Oe. The mechanical properties of the elasto-magnetic membrane were confirmed on application of an alternating magnetic field. The proposed methodology offers a new way for fabrication of novel microfluidic and microelectro-mechanical-systems devices.
Abstract: We report on a fabrication of a highly structured elasto-magnetic membrane with microscopic unit cells using lithographic techniques and electrodeposition. The membrane comprises micromagnets of CoNiP and Co connected via an elastic PDMS network with an area spanning 12 mm 2 . Ellipsoidal CoNiP and circular Co particles were produced by electrodeposition to achieve diameters of 30 (major) and 10 μm (minor) and 10 μm, respectively, with a thickness in the range of 6-10 μm. The electrodeposition parameters have been optimized on deposition of CoNiP films to produce an in-plane coercivity for CoNiP elements of 435 Oe. The mechanical properties of the elasto-magnetic membrane were confirmed on application of an alternating magnetic field. The proposed methodology offers a new way for fabrication of novel microfluidic and microelectro-mechanical-systems devices.
2018
Inhomogeneous assembly of driven nematic colloids – Pagès, J. M., et al. Soft Matter 15, 312–320 (2019).
 Abstract: We present a quantitative analysis of the nonequilibrium assembly of colloidal particles dispersed in a nematic liquid crystal. The driven particles assemble into reconfigurable circular clusters by liquid-crystal-enabled electrokinetic phenomena generated by an AC electric field that provides propulsion along the local director. We identify the coexistence of different aggregation states, including a central, jammed core, where short-range elastic attraction dominates, surrounded by a liquid-like corona where particles retain their mobility but reach a mechanical equilibrium that we rationalize in terms of a balance between centripetal phoretic drive and pairwise repulsion. An analysis of the compressible liquid-like region reveals a linear density profile that can be tuned with the field frequency, and a bond-orientational order that reaches a maximum at intermediate packing densities, where elastic effects are minimized. Since the phoretic propulsion force acts also on assembled particles, we compute the mechanical pressure and show that a hard-disk equation of state can be used to describe the assembly of this driven system.
Abstract: We present a quantitative analysis of the nonequilibrium assembly of colloidal particles dispersed in a nematic liquid crystal. The driven particles assemble into reconfigurable circular clusters by liquid-crystal-enabled electrokinetic phenomena generated by an AC electric field that provides propulsion along the local director. We identify the coexistence of different aggregation states, including a central, jammed core, where short-range elastic attraction dominates, surrounded by a liquid-like corona where particles retain their mobility but reach a mechanical equilibrium that we rationalize in terms of a balance between centripetal phoretic drive and pairwise repulsion. An analysis of the compressible liquid-like region reveals a linear density profile that can be tuned with the field frequency, and a bond-orientational order that reaches a maximum at intermediate packing densities, where elastic effects are minimized. Since the phoretic propulsion force acts also on assembled particles, we compute the mechanical pressure and show that a hard-disk equation of state can be used to describe the assembly of this driven system.
Torque driven ferromagnetic swimmers – Hamilton, J. K., et al. Phys. Fluids 30, 092001 (2018).
 Abstract: Microscopic swimming devices hold promise for radically new applications in lab-on-a-chip and microfluidic technology, including diagnostics and drug delivery. In this paper, we realize a macroscopic single particle ferromagnetic swimmer experimentally and investigate its swimming properties. The flagella-based swimmer is comprised of a hard ferromagnetic head attached to a flexible tail. We investigate the dynamic performance of the swimmer on the air-liquid interface as a function of the external magnetic field parameters (frequency and amplitude of an applied magnetic field). We show that the speed of the swimmer can be controlled by manipulating the strength and frequency of the external magnetic field (<3.5 mT) and that the propagation direction has a dependence on parameters of the external magnetic field. The experimental results are compared to a theoretical model based on three beads, one of which having a fixed magnetic moment and the other two non-magnetic, connected via elastic filaments. The model shows sufficient complexity to satisfy the “non-reciprocity” condition and gives good agreement with experiment. Via a simple conversion, we also demonstrate a fluid pump and investigate the induced flow. This investigation paves the way to the fabrication of such swimmers and fluid pump systems on a micro-scale, promising a variety of microfluidic applications.
Abstract: Microscopic swimming devices hold promise for radically new applications in lab-on-a-chip and microfluidic technology, including diagnostics and drug delivery. In this paper, we realize a macroscopic single particle ferromagnetic swimmer experimentally and investigate its swimming properties. The flagella-based swimmer is comprised of a hard ferromagnetic head attached to a flexible tail. We investigate the dynamic performance of the swimmer on the air-liquid interface as a function of the external magnetic field parameters (frequency and amplitude of an applied magnetic field). We show that the speed of the swimmer can be controlled by manipulating the strength and frequency of the external magnetic field (<3.5 mT) and that the propagation direction has a dependence on parameters of the external magnetic field. The experimental results are compared to a theoretical model based on three beads, one of which having a fixed magnetic moment and the other two non-magnetic, connected via elastic filaments. The model shows sufficient complexity to satisfy the “non-reciprocity” condition and gives good agreement with experiment. Via a simple conversion, we also demonstrate a fluid pump and investigate the induced flow. This investigation paves the way to the fabrication of such swimmers and fluid pump systems on a micro-scale, promising a variety of microfluidic applications.
Assembly and transport of nematic colloidal swarms above photo-patterned defects and surfaces – Straube, A. V. et al. New J. Phys. 20, (2018).
 Abstract: We investigate the dynamic assembly and swarm translocation of anisometric colloidal particles dispersed in a nematic liquid crystal and driven above a photosensitive surface. We use liquid crystal-enabled electrophoresis to propel these particles via an alternating electric field perpendicular to the sample cell. By manipulating the anchoring conditions on one surface of the experimental cell, we obtain a spatially extended spiral pattern of the liquid crystal orientation that induces the dynamic assembly of a rotating colloidal mill. This structure can be transported by translocating the topological defect above the photosensitive surface. We complement our findings with a theoretical model that captures the basic physics of the process, by formulating an analytic equation for the director field above the surface. Our reconfigurable nematic assemblies may be used as a test bed for complex swarming behaviour in biological and artificial microscale systems
Abstract: We investigate the dynamic assembly and swarm translocation of anisometric colloidal particles dispersed in a nematic liquid crystal and driven above a photosensitive surface. We use liquid crystal-enabled electrophoresis to propel these particles via an alternating electric field perpendicular to the sample cell. By manipulating the anchoring conditions on one surface of the experimental cell, we obtain a spatially extended spiral pattern of the liquid crystal orientation that induces the dynamic assembly of a rotating colloidal mill. This structure can be transported by translocating the topological defect above the photosensitive surface. We complement our findings with a theoretical model that captures the basic physics of the process, by formulating an analytic equation for the director field above the surface. Our reconfigurable nematic assemblies may be used as a test bed for complex swarming behaviour in biological and artificial microscale systems
Far-field theory for trajectories of magnetic ellipsoids in rectangular and circular channels – Matsunaga, D.et al. IMA J. Appl. Math. 83, 767–782 (2018).
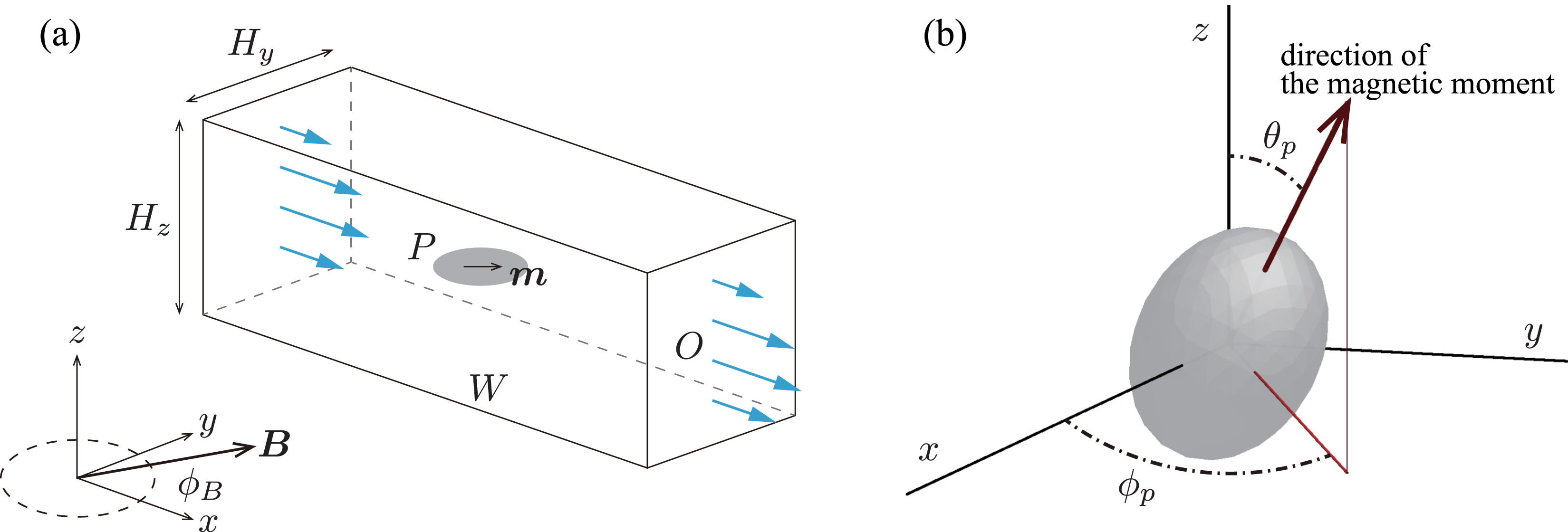 Abstract: We report a method to control the positions of ellipsoidal magnets in flowing channels of rectangular or circular cross section at low Reynolds number. A static uniform magnetic field is used to pin the particle orientation and the particles move with translational drift velocities resulting from hydrodynamic interactions with the channel walls which can be described using Blake’s image tensor. Building on his insights, we are able to present a far-field theory predicting the particle motion in rectangular channels and validate the accuracy of the theory by comparing to numerical solutions using the boundary element method. We find that, by changing the direction of the applied magnetic field, the motion can be controlled so that particles move either to a curved focusing region or to the channel walls. We also use simulations to show that the particles are focused to a single line in a circular channel. Our results suggest ways to focus and segregate magnetic particles in lab-on-a-chip devices.
Abstract: We report a method to control the positions of ellipsoidal magnets in flowing channels of rectangular or circular cross section at low Reynolds number. A static uniform magnetic field is used to pin the particle orientation and the particles move with translational drift velocities resulting from hydrodynamic interactions with the channel walls which can be described using Blake’s image tensor. Building on his insights, we are able to present a far-field theory predicting the particle motion in rectangular channels and validate the accuracy of the theory by comparing to numerical solutions using the boundary element method. We find that, by changing the direction of the applied magnetic field, the motion can be controlled so that particles move either to a curved focusing region or to the channel walls. We also use simulations to show that the particles are focused to a single line in a circular channel. Our results suggest ways to focus and segregate magnetic particles in lab-on-a-chip devices.
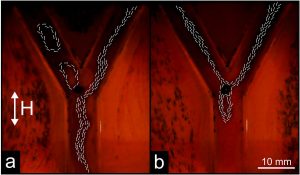
Clustering of magnetic swimmers in a Poiseuille flow – Meng, F. et al Phys. Rev. Lett. 120, 188101 (2018).
 Abstract: We investigate the collective behavior of magnetic swimmers, which are suspended in a Poiseuille flow and placed under an external magnetic field, using analytical techniques and Brownian dynamics simulations. We find that the interplay between intrinsic activity, external alignment, and magnetic dipole-dipole interactions leads to longitudinal structure formation. Our work sheds light on a recent experimental observation of a clustering instability in this system.
Abstract: We investigate the collective behavior of magnetic swimmers, which are suspended in a Poiseuille flow and placed under an external magnetic field, using analytical techniques and Brownian dynamics simulations. We find that the interplay between intrinsic activity, external alignment, and magnetic dipole-dipole interactions leads to longitudinal structure formation. Our work sheds light on a recent experimental observation of a clustering instability in this system.
Magnetically tunable bidirectional locomotion of a self-assembled nanorod-sphere propelle – García-Torres,J. M. et al. Nat. Commun. 9, 1663 (2018)
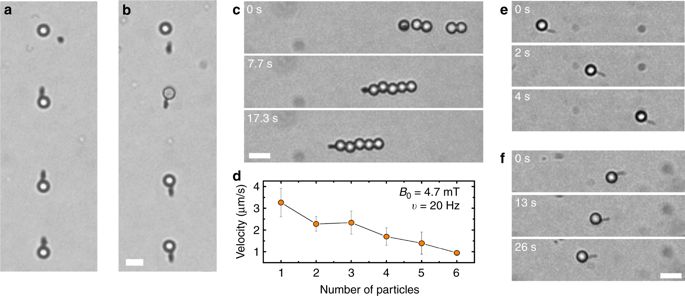 Abstract: Field-driven direct assembly of nanoscale matter has impact in disparate fields of science. In microscale systems, such concept has been recently exploited to optimize propulsion in viscous fluids. Despite the great potential offered by miniaturization, using self-assembly to achieve transport at the nanoscale remains an elusive task. Here we show that a hybrid propeller, composed by a ferromagnetic nanorod and a paramagnetic microsphere, can be steered in a fluid in a variety of modes, from pusher to puller, when the pair is dynamically actuated by a simple oscillating magnetic field. We exploit this unique design to build more complex structures capable of carrying several colloidal cargos as microscopic trains that quickly disassemble at will under magnetic command. In addition, our prototype can be extended to smaller nanorods below the diffraction limit, but still dynamically reconfigurable by the applied magnetic field.
Abstract: Field-driven direct assembly of nanoscale matter has impact in disparate fields of science. In microscale systems, such concept has been recently exploited to optimize propulsion in viscous fluids. Despite the great potential offered by miniaturization, using self-assembly to achieve transport at the nanoscale remains an elusive task. Here we show that a hybrid propeller, composed by a ferromagnetic nanorod and a paramagnetic microsphere, can be steered in a fluid in a variety of modes, from pusher to puller, when the pair is dynamically actuated by a simple oscillating magnetic field. We exploit this unique design to build more complex structures capable of carrying several colloidal cargos as microscopic trains that quickly disassemble at will under magnetic command. In addition, our prototype can be extended to smaller nanorods below the diffraction limit, but still dynamically reconfigurable by the applied magnetic field.
A new class of magnetically actuated pumps and valves for microfluidic applications – Hamilton, J. K. et al. Sci. Rep. 8, 933 (2018)
 Abstract: We propose a new class of magnetically actuated pumps and valves that could be incorporated into microfluidic chips with no further external connections. The idea is to repurpose ferromagnetic low Reynolds number swimmers as devices capable of generating fluid flow, by restricting the swimmers’ translational degrees of freedom. We experimentally investigate the flow structure generated by a pinned swimmer in different scenarios, such as unrestricted flow around it as well as flow generated in straight, cross-shaped, Y-shaped and circular channels. This demonstrates the feasibility of incorporating the device into a channel and its capability of acting as a pump, valve and flow splitter. Different regimes could be selected by tuning the frequency and amplitude of the external magnetic field driving the swimmer, or by changing the channel orientation with respect to the field. This versatility endows the device with varied functionality which, together with the robust remote control and reproducibility, makes it a promising candidate for several applications.
Abstract: We propose a new class of magnetically actuated pumps and valves that could be incorporated into microfluidic chips with no further external connections. The idea is to repurpose ferromagnetic low Reynolds number swimmers as devices capable of generating fluid flow, by restricting the swimmers’ translational degrees of freedom. We experimentally investigate the flow structure generated by a pinned swimmer in different scenarios, such as unrestricted flow around it as well as flow generated in straight, cross-shaped, Y-shaped and circular channels. This demonstrates the feasibility of incorporating the device into a channel and its capability of acting as a pump, valve and flow splitter. Different regimes could be selected by tuning the frequency and amplitude of the external magnetic field driving the swimmer, or by changing the channel orientation with respect to the field. This versatility endows the device with varied functionality which, together with the robust remote control and reproducibility, makes it a promising candidate for several applications.
2017
Focusing and Sorting of Ellipsoidal Magnetic Particles in Microchannels – Matsunaga, D.et al. Phys. Rev. Lett. 119, 1–5 (2017).
 Abstract: We present a simple method to control the position of ellipsoidal magnetic particles in microchannel Poiseuille flow at low Reynolds number using a static uniform magnetic field. The magnetic field is utilized to pin the particle orientation, and the hydrodynamic interactions between ellipsoids and channel walls allow control of the transverse position of the particles. We employ a far-field hydrodynamic theory and simulations using the boundary element method and Brownian dynamics to show how magnetic particles can be focused and segregated by size and shape. This is of importance for particle manipulation in lab-on-a-chip devices.
Abstract: We present a simple method to control the position of ellipsoidal magnetic particles in microchannel Poiseuille flow at low Reynolds number using a static uniform magnetic field. The magnetic field is utilized to pin the particle orientation, and the hydrodynamic interactions between ellipsoids and channel walls allow control of the transverse position of the particles. We employ a far-field hydrodynamic theory and simulations using the boundary element method and Brownian dynamics to show how magnetic particles can be focused and segregated by size and shape. This is of importance for particle manipulation in lab-on-a-chip devices.
Fabrication of nanotweezers and their remote actuation by magnetic fields –Iss, C. et al. Sci. Rep. 7, 1–9 (2017).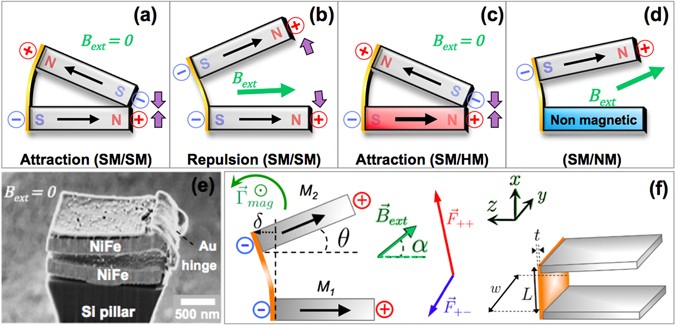
Abstract: A new kind of nanodevice that acts like tweezers through remote actuation by an external magnetic field is designed. Such device is meant to mechanically grab micrometric objects. The nanotweezers are built by using a top-down approach and are made of two parallelepipedic microelements, at least one of them being magnetic, bound by a flexible nanohinge. The presence of an external magnetic field induces a torque on the magnetic elements that competes with the elastic torque provided by the nanohinge. A model is established in order to evaluate the values of the balanced torques as a function of the tweezers opening angles. The results of the calculations are confronted to the expected values and validate the overall working principle of the magnetic nanotweezers.
Magnetically controlled ferromagnetic swimmers – Hamilton, J. K. et al. Sci. Rep. 7, 44142 (2017)
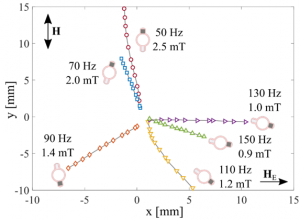 Abstract: Microscopic swimming devices hold promise for radically new applications in lab-on-a-chip and microfluidic technology, diagnostics and drug delivery etc. In this paper, we demonstrate the experimental verification of a new class of autonomous ferromagnetic swimming devices, actuated and controlled solely by an oscillating magnetic field. These devices are based on a pair of interacting ferromagnetic particles of different size and different anisotropic properties joined by an elastic link and actuated by an external time-dependent magnetic field. The net motion is generated through a combination of dipolar interparticle gradient forces, time-dependent torque and hydrodynamic coupling. We investigate the dynamic performance of a prototype (3.6 mm) of the ferromagnetic swimmer in fluids of different viscosity as a function of the external field parameters (frequency and amplitude) and demonstrate stable propulsion over a wide range of Reynolds numbers. We show that the direction of swimming has a dependence on both the frequency and amplitude of the applied external magnetic field, resulting in robust control over the speed and direction of propulsion. This paves the way to fabricating microscale devices for a variety of technological applications requiring reliable actuation and high degree of control.
Abstract: Microscopic swimming devices hold promise for radically new applications in lab-on-a-chip and microfluidic technology, diagnostics and drug delivery etc. In this paper, we demonstrate the experimental verification of a new class of autonomous ferromagnetic swimming devices, actuated and controlled solely by an oscillating magnetic field. These devices are based on a pair of interacting ferromagnetic particles of different size and different anisotropic properties joined by an elastic link and actuated by an external time-dependent magnetic field. The net motion is generated through a combination of dipolar interparticle gradient forces, time-dependent torque and hydrodynamic coupling. We investigate the dynamic performance of a prototype (3.6 mm) of the ferromagnetic swimmer in fluids of different viscosity as a function of the external field parameters (frequency and amplitude) and demonstrate stable propulsion over a wide range of Reynolds numbers. We show that the direction of swimming has a dependence on both the frequency and amplitude of the applied external magnetic field, resulting in robust control over the speed and direction of propulsion. This paves the way to fabricating microscale devices for a variety of technological applications requiring reliable actuation and high degree of control.
Emergent propagation modes of ferromagnetic swimmers in constrained geometries – Bryan, M. T. et al. Appl. Phys. 121, 73901 (2017)
 Abstract: Magnetic microswimmers, composed of hard and soft ferromagnets connected by an elastic spring, are modelled under low Reynolds number conditions in the presence of geometrical boundaries. Approaching a surface, the magneto-elastic swimmer’s velocity increases and its trajectory bends parallel to the surface contour. Further confinement to form a planar channel generates new propagation modes as the channel width narrows, altering the magneto-elastic swimmer’s speed, orientation, and direction of travel. Our results demonstrate that constricted geometric environments, such as occuring in microfluidic channels or blood vessels, may influence the functionality of magneto-elastic microswimmers for applications such as drug delivery.
Abstract: Magnetic microswimmers, composed of hard and soft ferromagnets connected by an elastic spring, are modelled under low Reynolds number conditions in the presence of geometrical boundaries. Approaching a surface, the magneto-elastic swimmer’s velocity increases and its trajectory bends parallel to the surface contour. Further confinement to form a planar channel generates new propagation modes as the channel width narrows, altering the magneto-elastic swimmer’s speed, orientation, and direction of travel. Our results demonstrate that constricted geometric environments, such as occuring in microfluidic channels or blood vessels, may influence the functionality of magneto-elastic microswimmers for applications such as drug delivery.
2016
Magneto-optical micromechanical systems for magnetic field mapping – Truong, A. et al. Sci. Rep. 6, 31634 (2016)
 Abstract: A new method for magnetic field mapping based on the optical response of organized dense arrays of flexible magnetic cantilevers is explored. When subjected to the stray field of a magnetized material, the mobile parts of the cantilevers deviate from their initial positions, which locally changes the light reflectivity on the magneto-optical surface, thus allowing to visualize the field lines. While the final goal is to be able to map and quantify non-uniform fields, calibrating and testing the device can be done with uniform fields. Under a uniform field, the device can be assimilated to a magnetic-field-sensitive diffraction grating, and therefore, can be analyzed by coherent light diffraction. A theoretical model for the diffraction patterns, which accounts for both magnetic and mechanical interactions within each cantilever, is proposed and confronted to the experimental data.
Abstract: A new method for magnetic field mapping based on the optical response of organized dense arrays of flexible magnetic cantilevers is explored. When subjected to the stray field of a magnetized material, the mobile parts of the cantilevers deviate from their initial positions, which locally changes the light reflectivity on the magneto-optical surface, thus allowing to visualize the field lines. While the final goal is to be able to map and quantify non-uniform fields, calibrating and testing the device can be done with uniform fields. Under a uniform field, the device can be assimilated to a magnetic-field-sensitive diffraction grating, and therefore, can be analyzed by coherent light diffraction. A theoretical model for the diffraction patterns, which accounts for both magnetic and mechanical interactions within each cantilever, is proposed and confronted to the experimental data.